| まどかの | 自 | 己 | 満 | 足 | 日記 |
まどかは「P/ECE Hand Book」を応援しています
|
0324
|
2002/09/01(日)■ | |
| むぅ、くやしぃー | ||
| えー、今日は、午前中に彼女の家に遊びに行って、久しぶりにバルーンファイトで遊んだ後、名駅の方に出掛けて、本屋を何件かまわって、「ラジコン技術」と「RCマガジン」を購入して、時間が来たので高砂殿に向かいました。 で、彼女がエステのカウンセリングかなんかを受けている間、私は婚礼の担当者とちょっとした打ち合わせをして待ってました。 そして、彼女が戻ってきてからは、生活倉庫でちょっとお買い物をしました。 今日買ったのは、株式会社グラディーってところが作っている、ファーストフードのドリンク型をしたパクパク人形です(^^; まだ、HPの方にも紹介されていない新製品みたい。 私はこういう指人形って言うか、あやつり人形が大好きで、旅先で見つけてはお土産に買って帰ります。 この前の社員旅行でも、高山のサルぼぼ指人形を見つけて買ってきました(^^; いつか、安いUSBカメラかなんかを買って、こういうあやつり人形を使っての「パペットアニメ」を創ってみたいです(^^ その時には、簡単にそういうアニメが作れるツールなんかを作って公開したいです。もちろんフリーで。 こういうときにプログラマって便利ですよね。「無いものは創る」の精神で、なんでもできちゃいます。 動画に関係ある、VFW(VideoForWindows)やDirectShowは、学生時代や仕事でちょっとやってたことがあるので、がんばれば創れそうです(^^ という内容で、彼女と帰りのバスを待っている間に盛り上がったので、今から楽しみです(^^ で、彼女と別れてから、部屋に帰って、昨日失敗したP/ECE企画の基盤のテストの続きをしました。 どこが間違っているかを調べるために、同じ回路をブレッドボード上で再現して色々チェックしていたら、どうもちゃんと動かなかったのは、半固定抵抗の抵抗値がおかしかったからで、ちゃんとした抵抗値にしたら、実験時と同じように動作しました(^^; いやぁ、ちゃんと実験時と同じように配線したのに動かないなんて、一時は回路不信(?)に陥るところでしたよ(^^; というわけで、めでたく基盤が完成したところで、今やっているP/ECE企画の内容を公開します。 名付けて、「P/ECEでファミコンロボットコントローラ」です。 これは、どういうものかといいますと、その昔ファミコンの周辺機器として、専用ソフトを使用してテレビから発せられる光を感知して動くという「ファミコンロボット」なるものがありました。 このロボットは、テレビからパルス発光される緑色の光を、ロボットの頭部(眼ですね)にある光センサで信号として読み取って、信号のコマンド通りに腕を上げたり回したりと、ちょっとした制御ができる不思議なものでした。 で、今回P/ECEでやりたかったのは、このテレビからの光の発光タイミングを光センサを利用してサンプリングし、サンプリングしたタイミング通りにP/ECEで緑色のLEDを光らせて、P/ECEでファミコンロボットを制御しようということでした。 そして、ようやく基盤も完成し、実際にファミコンロボットの専用ソフトを使用して光をサンプリングし、ロボット向かってLEDを光らせてみたのですが、うんともすんとも動きません。 サンプリングの仕方が悪いのかと、何度も繰り返し試してみたのですが、どうも無理っぽいので、非常に残念ですが、この企画は失敗だったようです(j-j 回路の挙動としては、ちゃんとサンプリングした通りにLEDもパルス発光しているっぽい(見た目には)ので、敗因はおそらく、LEDの光の強さが足らなかったのか、使用したLEDの光の波長がロボットが感知するピーク感度の波長から外れているからだと思います。 ロボットの眼にLEDを接して光らせても反応しないし、テレビから結構離しても専用ソフトの光にロボットが反応することから、たぶん後者の敗因が最もな理由っぽいです。 もし、ロボットの光センサの前に、指定の波長の緑色だけを通す「緑色フィルタ」が付けられていたら、他の波長の光で反応させるのは、かなりの明るさで光らせないと無理なので、この理由が確実だと思います。 仮にも、あの天下の任天堂が創ったものなので、フィルタが入っていてもおかしくないですし。っていうか、普通付けますよね(--; 私の考えが甘かったようです。 なんか、いまさらながら任天堂商品の偉大さを実感した気がします。 こんなことは当たり前のようですが、どんな状況でも正常に動作させようとする配慮、完璧です。手は抜いてませんね(^^; というわけで、今回は任天堂に完敗です。 でも、まだP/ECE企画は色々あるので、次の企画で頑張ろうと思います。 あ、次の企画も任天堂がらみだなぁ。うーん。 でも、次は負けないぞ! (勝ち負けはありません(^^;) で、次は何をするかといいますと、アナログデバイセズという会社が販売している「ADXL202」という加速度センサを利用した、名付けて「P/ECEでコロコロカービィTM任天堂」です(^^; この加速度センサを使ったサンプルは、もうすでにえとさんが発表されているので、二番煎じになりますが、やっぱり自分でも作ってみないとモノにはできないので、作ってみることにしました。 ってなわけで、この今回の失敗にもめげずに、明日からは「コロコロカービィ」目指して頑張ります! あ、はじめに言っておきますが、コロコロカービィの移植はとてもじゃないけどできないので、コロコロカービィの操作感を踏襲して、ボール転がして遊ぶ迷路脱出ゲームでも作ろうと思います。 もし、できるならキャメルトライみたいなP/ECEを回転させて遊ぶようなのもできたらいいなぁ。これは描画ルーチンの方もちょっと大変なので、処理が追いつかないかもしれませんね(^^; ちなみに、私はコロコロカービィを遊んだことが無いので、そこから始めたいと思います。あと、ゲームボーイカラーも無いので、ほんとにそこから始めないと……(^^; それでは、今日はここまで。 おやすみなさーい。 | ||
|
0323
|
2002/08/31(土)■ | |
| 基盤は完成したけれど…… | ||
| はい、今日はお休みの日なので、のんびりお昼まで寝た後、ちょっと名駅の方へお買い物に行って、会社帰りの彼女にちょっと会って、部屋に帰って夕飯を食べた後、P/ECE企画の基盤製作に取り掛かりました。 で、昨日仕事で作った基盤よりは部品数も少ないし、簡単なので(それでも結構時間掛かりましたが(^^;)割とすぐできました(^^ そして、早速P/ECEにつないで、以前に実験で使ったテストプログラムを使って、テストしてみたのですが…… 全然動きません(j-j 実験の時にP/ECEを使ってやったときは上手くいってたのに、基盤にしたとたん全然ダメに。 テスターで色々調べてみると、どうも電圧が足らなくなっている模様。 この基盤には緑色の高輝度LEDがつけてあって、P/ECEの電源電圧である3.3Vで光らせるとちょうど良い計算で設計し、実験ではP/ECEの拡張端子にある電源ラインに接続して光らせていたのですが、本番で拡張端子のI/O端子に接続してみたところ全然光らないんです。 P/ECEのI/O端子は、High状態の時に電源電圧と同じ3.3Vになるので、I/O端子につなげてもLEDを光らせることができると踏んでいたのですが、実際接続してみると、2.5V程しか電圧が得られず全然光りません。 勉強不足の今の私では、なんで2.5Vに下がってしまうのか理由は分かりませんが、他のI/O端子を一緒につなげたら、だんだん電圧が上がってきて、全部つなげて何とか2.8Vまでになってそこそこ光るまでになりました。 で、なんか上手く動かないのがLEDだけだったらいいのですが、運の悪いことに、光センサの電流-電圧変換部分もまったく正常動作しません(j-j 実験段階では、OPアンプを使って光センサの反応を電圧に変換して増幅し、光センサに反応があった場合は 1.8Vくらいの電圧が得られるはずなんですが、なんか40mVくらいしかないし…… っていうか、光センサから発生する電圧のほぼそのままがOPアンプから出力されているので、OPアンプが壊れているか、増幅に使用する抵抗がちゃんと繋がってないのかなぁ。 色々調べても良く分からないし、だいぶ遅い時間になってしまったので、今日は諦めてこれで終わりにします。 明日は、、午前中は彼女の家に遊びに行って、午後からは名駅をちょっと回って、高砂殿に行く予定です。 それでは、おやすみなさーい。 | ||
|
0322
|
2002/08/30(金)■ | |
| 今日は一日ハード屋さんでした(^^; | ||
| えー、今日は昨日一日考えたセンサの回路を、実際にユニバーサル基板上に配置して、はんだ付けする作業を一日かかってやってました(^^; 部品数は、それほど多くは無いのですが、小さい基盤に実装するので細かい作業が必要で、かつ、まだ私のはんだ付けがへたくそなわけで、昼食も取らずに集中して頑張って、8時間くらいかかってようやく完成しました(^^; 完成したら、ちょっと休憩した後、電源をつなげて作動実験をし、ちゃんと動いていることを確認して、今日は終わりにしました。 そして、残念ながら本日を持って退社してしまう社員さんの送別会として、みんなで飲みにいって、酔いが覚めるまで適当に休んでから、部屋に帰りました。 明日は、一日のんびり過ごす予定です。P/ECE企画の方の基盤も製作する予定です。 それでは、今日はここまで。 おやすみなさーい。 | ||
|
0321
|
2002/08/29(木)■ | |
| 回路の配置考えてました | ||
| はい、今日は任されているセンサ回路の部品を小さいユニバーサル基板上にキレイに配置することを一日考えてました。 部品の設置面積が小さい上に部品数も多いので、結構悩んでしまいました。 で、今日はほとんどそればっかりしてたので、疲れました(^^; そして、普通に仕事を終えて、部屋に帰り、ちょっと日記を書いて寝てしまいました。 この日記は、8/30の朝に書いてます(^^; もう8月も終わりですね。 夏休みが終わると、学生の数がまた増えるので、電車通勤の方達は、また狭い思いをすることになります(^^; がんばってくださいね。 というわけで、今日はここまで。 それでは、また明日ぁー。 | ||
|
0320
|
2002/08/28(水)■ | |
| ミラーサンプル届きました(^^ | ||
| えー、今日はアプリ開発の仕事もひと段落したので、センサの設計の続きなどをしてました。 で、普通に作業をしていたところに、私宛の封筒が届き、私宛にモノが届くことはめったに無いので(^^;)ワクワクしながら、送り元の名前を見ると、ヴイストン株式会社…… なんと! 先週今度のP/ECE企画で必要な部品のサンプルを、先着50名でしたが無料で配布して頂いた、ヴイストン株式会社からではないですか!! で、サンプルでもらった部品は何かといいますと、実は全方位センサのミラーなんですよ(^^ いきなりですが、この全方位センサというのは、このヴイストン株式会社が開発した、ワンショットで360°全方位の画像が取得できる部品で、CCDカメラと専用の特殊形状ミラーを組み合わせてセンサとしています。 それでは、以下に送られてきたミラーサンプルの写真を紹介します。 ちなみに、製品版のミラーは金属製で、サンプルはプラスティックにメッキされたものです。 まずは、送られてきた封筒の中身を紹介。 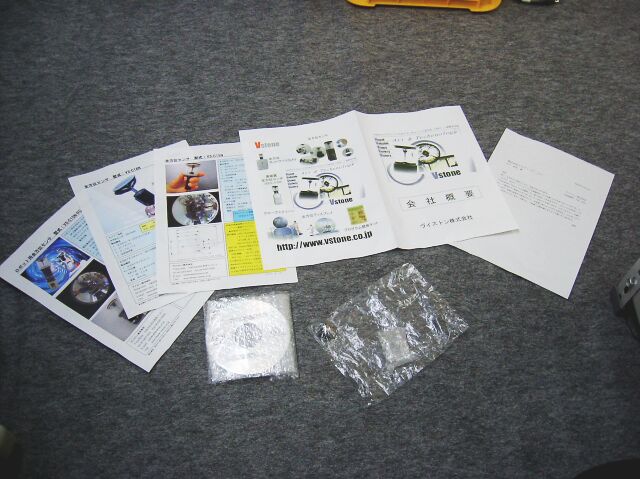 中央下のビニール袋に入った小さい丸がミラーサンプルで、その他に全方位センサのカタログと会社概要、ミラーからの曲座標の画像を展開するアプリの体験版などが入ったCD-Rが入ってました。 カタログなどの書類が全てカラー印刷なのが気合入ってますよね(^^ ちなみに、挨拶の書類は社長自らが書かれたようで、好印象です。 体験版の入ったCD-Rには、全方位センサを紹介するムービー(約25分)も収録されていて、無料で頂いたのに結構なボリュームですごいです。太っ腹。 残念ながら、全方位センサは個人には高すぎて購入できないのですが、ここでいっぱい宣伝しますので、許してくださいね(^^; えー、それでは次に肝心のミラーの形状と、実際にミラーを使用して撮影した画像を公開します。  これが、ミラーの形状。 全方位センサの紹介ムービーで、社長自ら(たぶん)が説明されていた通り、円錐の先が丸くなった、特殊な形状をしています。 円錐の頂点部分には穴が空いていて、ニードル(針)が取り付けられるようになっています。このニードルの役割は、無料サンプルを希望するともらえるカタログに説明されていますので、興味を持った方は、ぜひヴイストン株式会社のHPでコンタクトしてみてくださいね。  はい、これが実際にミラーを使って撮影したデジカメの画像です。 どうです? 全方位が撮影できているのがわかるでしょうか。 歪んで映っているように見えますが、ミラーの形状が円錐形なので、曲座標の逆変換を施すことで、パノラマ写真のような画像に変換することができます。 ちなみに、ミラーが半球型の場合は、ホントに歪んで映るので、上手くパノラマ写真のように変換ができません。 その証拠といっては何ですが、先週の土曜日に代替品としてどうかと東急ハンズで購入した、ステンレス半球の画像を載せておきます。比較してみてくださいね。  ステンレス半球の形状。当たり前ですが、半球です(^^;  これが、ステンレス半球で撮影した画像です。 全方位センサのミラーに比べて、撮影できる範囲が狭くなっているのと、ミラーの接地面まで見えてしまっているのがお分かりでしょうか。 この違いは、私みたいな趣味でやろうと思っている人にはたいした問題ではありませんが、画像処理の世界では、効率の問題からも結構イタイですね(^^; さすが、ヴイストンさん。考えてあります。 ちなみに、このミラーは通常アクリルの筒と台座でカメラと接続して使用するのですが、アクリルの代わりに、これも先週東急ハンズで購入した、ポリカーボネート製の筒をつけて撮影してみました。  見事に反射しちゃってますね(^^; 実はニードルを使うと、この反射が防げるらしいのですが、このステンレス半球には穴が空いてないし、ニードルも無いのでこれ以上は無理です(^^; で、今更ですが、なんでこういう部品を手に入れたかといいますと、もうおわかりの人もいらっしゃるかもしれませんが、以前科学館で実演されていた、色を認識して追尾する自立型ロボットを私も創ってみたくなったのですよ。それもP/ECEで! そのどこどこ研究所だったかが創ったロボットも、この全方位センサを使い、アプリケーションも付属のものをそのまま使っていたようだし、ロボットのアルゴリズムもなんとなくわかるので、精度は悪くなるでしょうが、個人レベルでもそういうロボットが作れることを証明したくなって、挑戦することにしました。 まだ他のP/ECE企画も待っているので、実際に製作作業に取り掛かるのは、まだまだ先のことになるんでしょうけど、コツコツやっていこうと思います。 そうそう、昨日ちょっと疑問に思ってた高輝度LEDを光らせたときの電流ですが、今日ハード担当の上司に相談したところ、計算は合っていたみたいで、あんなに明るくても、計算通りの電流が流れているみたいで、安心しました。 で、緑色のLEDは1Ωをはさむと6mA流れる計算になります。 ということは、直接拡張端子につなげてもOKですね。これで、トランジスタはさんで間接的に発光させる必要ななくなりました(^^; ちなみに、使用する緑色高輝度LED(NSPG510S)は4400mcdという明るさらしく、mcdは「ミリカンデラ」と読みます。 っていっても、よく分からないので、ここでちょっとお勉強。 光度の単位(カンデラ) カンデラは、周波数540×1012ヘルツの単色放射を放出し、所定の方向におけるその放射強度が1/683ワット毎ステラジアンである光源の、その方向における光度である。 カンデラは、白金の凝固点にある黒体の一平方メートルの平らな表面の垂直方向の光度の六〇〇、〇〇〇分の一の光度とする。 光度の単位;周波数540x1012Hz(波長555nm)の単色照射を放出し所定の方 向の照射強度が1/683W・sr‐1である光源のその方向における光度。 ちなみに代表的な赤色LEDであるTLR123(3φ?赤色)だと、標準で3.5mcdみたいなので(データシート参照)、4400mcdってことは、赤色LEDの約1257倍もの明るさということになる。 恐ろしい。 このLEDは順電流が20mAなので、20mAで4400mcdで1257倍だとして、単純に電流に比例して明るさが変化するとしたら、 (4400[mcd] / 20[mA]) * 6[mA] / 3.5[mcd] = 220[mcd] * 6[mA] / 3.5[mcd] = 377.14285714285714285714285714286[倍] ということで、6mAで光らせても、赤色LEDの約377倍の明るさということで、光輝度ってめちゃ明るいです(^^; 普通は、こんな1オームをつなげてやるようなつかいかた(順電圧より電源電圧が低いなんてこと)はしないらしいですが、趣味レベルなら大丈夫なんじゃない? とのことでした(^^; ってなわけで、着々と企画は進行していってますので、気長に待ってくださいね。 それでは、今日はこの辺で、おやすみなさーい。 | ||
|
0319
|
2002/08/27(火)■ | |
| ひと段落しました | ||
| えー、今日は朝から健康診断を受けて、その後はアプリ開発の仕事の続きをして、その仕事をひと段落させることができました。 こちらの環境は動作確認ができない状況が続いたので、結構ドキドキしましたが、どうやら上手くいっているようなので、ホッとしました(^^; その他、今度高校生の後輩に教える電子回路の案を考えたり、その他色々やってました。 で、普通に部屋に帰って、1時間程彼女と電話で話した後、先日実験が成功したP/ECE企画の回路をもう一度計測して、抵抗やコンデンサの調整をしてました。 今回の企画では制御用に緑色の高輝度LEDを駆動する必要があり、今日はそこらへんの駆動回路の実験も含めて計測したのですが、どうもP/ECEの拡張端子にLEDを直接つなげて駆動するのは、ちょっと危険な気がするので、LEDは拡張端子から出ているVDDとGNDの間に抵抗を挟んで接続し、拡張端子からはトランジスタを通じて間接的にLEDを駆動するようにしようと思います。 ちなみに、緑色のLEDは3.5V・20mAで駆動するのが推奨されていて、P/ECEの電源電圧である3.3Vでは駆動することができないように思えますが、実際に繋げてみると、ちゃんと光るので大丈夫なみたいです。 ただ、心配なのが駆動するときの電流量で、一応電源電圧3.3V時の緑色LEDの降下電圧を測ってみると、 約3.294Vで、10mAでLEDを光らせようと思ったら、 (3.3-3.294)[V] / 0.010[A] = 0.6[Ω] という計算で、0.6Ωの抵抗を挟めば良い計算になりますが、試しに1Ωの抵抗を挟んで光らせてみたら、どうも10mAで光っている明るさじゃない気がします(^^; 高輝度LEDってこんなに明るいのが普通なのかな? というわけで、ちょっと心配になったので、明日ハード担当の上司に聞いてみることにします。 けど、今までさんざん実験してもP/ECEは壊れてないし、実際に制御に使うときは、いわゆるパルス発光で使用するので、多分大丈夫だと思います。(でも、自分でするときは自己責任でね) それで、また今度LED駆動も含めた回路を設計して、回路基盤の製作に入ることにします。 今度の土曜日あたりできそうかな。たぶん。 というわけで、今日はここまで。 それでは、おやすみなさーい。 | ||
|
0318
|
2002/08/26(月)■ | |
| 今日は半日教育係でした(^^; | ||
| はい、今日は後輩の高校生がうちの会社に勉強しにくる日なので、朝からVBを教えてました。 で、勉強用には、家でも使えるように、参考書の付属CD-ROMに入ってた、評価版のVB6.0を使用してもらっているのですが、コモンダイアログコントロールを覚えてもらおうと、サンプルを作っていたら、コントロールを取り込むところで、「書き込みできません」と表示されて、コモンダイアログを取り込むことができません。 たぶん評価版だから、制限されているんだろうなということで、プログラムの勉強はとりあえずいったん終了して、今日は、簡単な電子回路の勉強をすることにしました。 ちょっと今後の勉強についての打ち合わせをしてから、お昼を食べに行くついでに、大須の電気街へ繰り出して、いろいろお店を回って部品を買ってきました。 今日買ってきた部品は、私のP/ECE企画に使う抵抗やコンデンサ類と、今日体験してもらう実験で使用する部品を購入しました。 今日する実験は、ほんとに簡単な、LEDを電池で駆動して、スイッチで光らせたり消したりする回路で、電池とLEDとスイッチと、後輩に、その場で計算してもらって買ってきた抵抗をつなげて、実験してもらいました(^^; まぁ、実験といってもただ全部つなげるだけなので、難しいことはなんにもなく、遊びみたいなものですが、後輩は明るく光るLEDにはしゃいで色んなところを照らしてました(^^ 今日はちょっと奮発して,高輝度のLEDを買ってきたので、それは明るかったことでしょう。ちなみに、おまけとして、日亜化学の青色高輝度LEDも買ってきました。 そして、オームの法則の復習と、LEDの性質の話をちょっとして今日のお勉強は終了。 後輩が帰った後は、アプリ開発の仕事で、機能修正の電話があったので、それに対応してました。 対応が終わり、メールを送ったのですが、返事が全然返ってこないので、今日はもう帰ることにしました(^^; で、部屋に帰ってからは、明日健康診断があるので、一応何もせずに、早めに寝ました。 というわけで、今日はここまで。 おやすみなさーい。 | ||