[仕様] [ムービー] [写真(材料)] [写真(パーツ)] [写真(組立中)] [写真(完成)] [ソフトウェア] [ダウンロード]
Pen4号のその後:製作日誌0(2007.09.02~2008.02.17)/ 製作日誌1(2013.01.27~2014.03.23)/ 製作日誌2(2017.08.19~)
[仕様] [ムービー] [写真(材料)] [写真(パーツ)] [写真(組立中)] [写真(完成)] [ソフトウェア] [ダウンロード]
Pen4号のその後:製作日誌0(2007.09.02~2008.02.17)/ 製作日誌1(2013.01.27~2014.03.23)/ 製作日誌2(2017.08.19~)
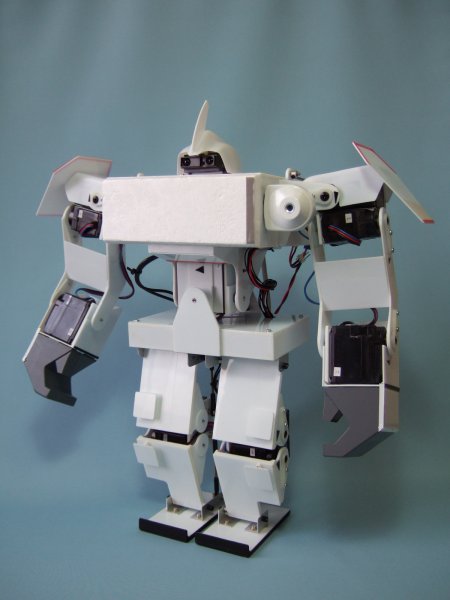
13自由度のロボットで、自由度の割り振りは脚:2×2、腕:3×2、腰:2、首1 となっています。逆運動学計算を適用したプログラムが作りやすいように平面内で計算が 出来る2自由度の脚としました。腕はモーションエディタを使ってモーションを作る時に 表情が出せて面白いように自由度3としました。
センサは自律移動と運動制御が試せるように、数は少ないですが外界センサと内界センサを それぞれ装備しています。
| 全高 | 320mm |
| 全長 | 160mm |
| 全幅 | 260mm |
| 本体の重量 | 約1200g |
| 合計自由度 | 13(脚:4、腕:6、腰:2、首:1) |
| モーター |
RC用サーボモーター |
| 電源 |
ニッケル水素電池 (6.0V 1100mAh) |
| センサー |
|
| CPU |
H8/3067F(20MHz, 32k byte RAM) |
前進(高速)
|
|
前進(低速)
|
|
起き上がり
|
|
パンチ
|
|
自律モード
|
例えばネジや電線など細かい部品もありますが、主な部品といえばここに紹介するような
物です。
イメージをクリックすると大きな写真が見られます。
 |
 |
 |
 |
|
マイコンキット RCサーボなどを制御します。 |
RCサーボ 関節を動かします。 |
Ni-MH 電池 動力源です。 |
ジャイロ 歩行の安定化のために載せます。 |
 |
 |
 |
 |
|
加速度センサ 姿勢の判断に利用します。 |
距離センサ 自律移動の時に周囲を探ります。 |
プラ板 フレームの構造材料です。 |
プラ棒 フレーム接着部の補強に使います。 |
プラ板などの素材や、電子部品から製作した部品です。ここまで作るのが結構大変です。
 |
 |
 |
 |
|
足 軸受けは強度を出すため アルミアングルを使いました。 |
脛と腿(表側) | 脛と腿(裏側) |
膝のRCサーボ RCサーボは両面テープで 貼り合わせてあります。 |
 |
 |
 |
 |
|
腰(表) センサや基板を入れられる スペースがあります。 |
腰(裏) 関節はアルミ製です。 |
胸(表) 中にマイコンボードを 収めます。 |
胸(裏) |
 |
 |
 |
 |
|
腰RCサーボ 軸が直交するように 貼りあわせてあります。 |
上腕 |
前腕 |
肩のRCサーボ |
 |
 |
 |
|
|
マイコンボード(表) |
マイコンボード(裏) 配線はほとんど表側に あります |
I/Oボード(表) マイコンを外した状態です。 |
組立の途中で、ある程度形になったときに撮影したスナップ写真です。
 |
 |
 |
 |
|
腕 |
頭 首を動かすRCサーボと 距離センサから成ります。 |
ジャイロ 歩行を安定化するジャイロを 腰フレームの中に積んでいます。 |
マイコンボード マイコンボードは胸フレーム の中に積んでいます。 |
 |
 |
 |
 |
|
下半身(前) 下半身が組みあがった ところです |
下半身(後) |
カウルのアップ(前) 頭のカウルはバキューム フォームで製作しました。 |
カウルのアップ(後) 肩のカウルはヒートプレス で製作しました。 |
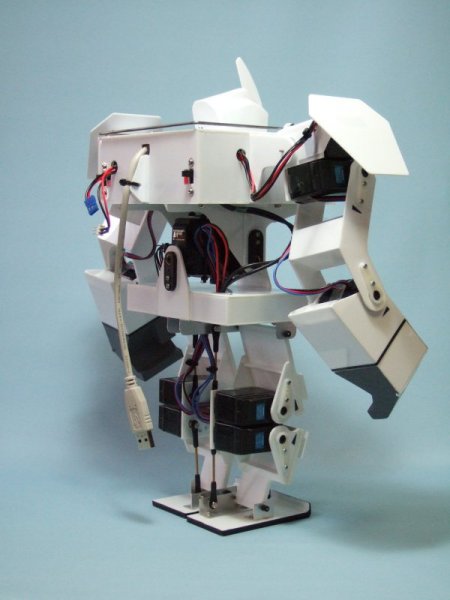
完成した時に、大きさが分かるような写真を撮影しました。
 |
 |
 |
|
ノートPCと A4ノートPCと同じ くらいの大きさです。 |
プレステパッドと |
輸送のポーズ ヒザを抱える様な姿勢をとると コンパクトになります。 |
本サイトは全体的に、ロボット製作に関する情報提供を目的としていますが、ロボットのバリエーションが 増えることを願っているので、あえて「そのまま作れる」様な形では情報をそろえていません。
しかしながら「そのまま作りたい」という要望が時々寄せられることも事実です。 そんなニーズに応えるために 書いた本なので、本サイトの中では例外的に複数の図面間やソースコードとそのコメントの間の 整合性が取れていて、そのまま作れるようになっています。
多くの人の役に立つようにと書いたドキュメント類なので、これはこれで利用していただければ 嬉しいです。
本の中では製作の手順、注意点、背景にある考え方などもステップバイステップの写真入で 詳しく説明していますので、「作り方を詳しく知りたい!」と思われた方は、ぜひ本の方も 見てみてください。(ちなみに本は2023年01月現在、電子書籍とオンデマンド出版の形で入手可能です。)
Visitor Number
Aug 2007