
とりあえず、以下の様な事をやってみようと作業をはじめました。
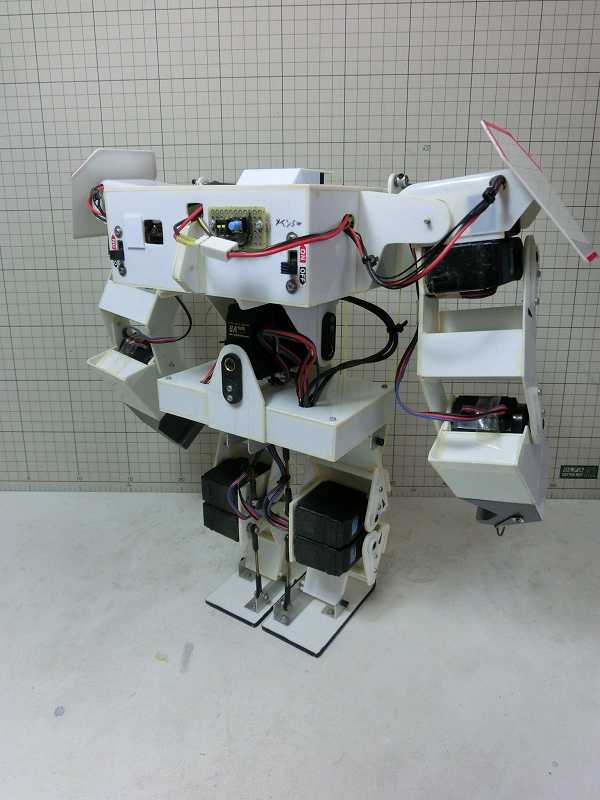
| 全高 | 320mm |
| 全長 | 160mm |
| 全幅 | 260mm |
| 本体の重量 | 約1200g |
| 合計自由度 | 12(脚:4、腕:6、腰:2) |
| モーター |
RC用サーボモーター |
| 電源 |
ニッケル水素電池 (7.2V 700mAh) |
| センサー |
|
| CPU |
mbed LPC1768(32bit 96MHz) H8/3664F(16bit 16MHz) |
操縦デモ(腕の操作と移動機能)
腕もジョイパッドから動かせるようになっています。 |
|
操縦デモ(腕の操作)
|
|
操縦デモ(移動機能)
|
 |
 |
 |
 |
 |
|
足裏のタッチセンサ(圧力センサ) 歩行中の足裏の接地の具合を測定して歩行に 反映させることを目標に、FSR-402という 圧力センサを試してみました。 |
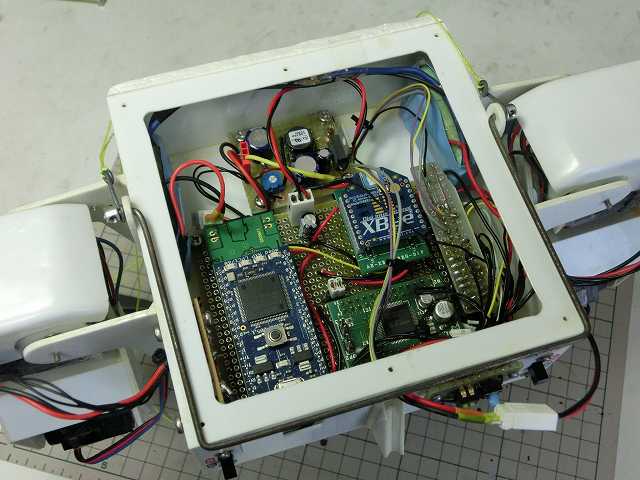
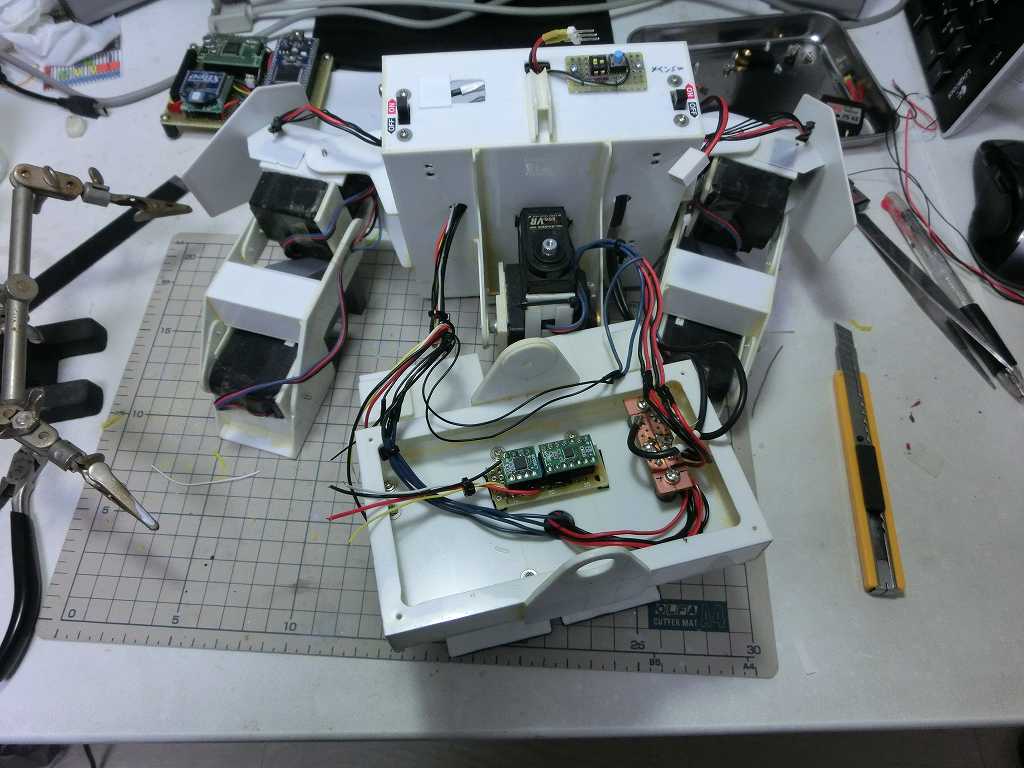
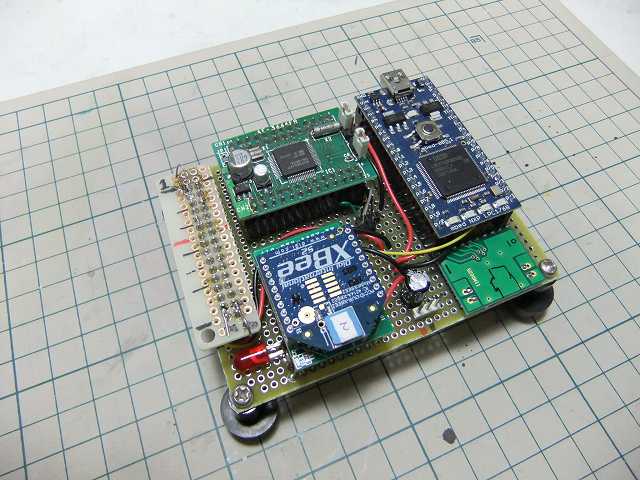
マイコンボードと電源ユニット |
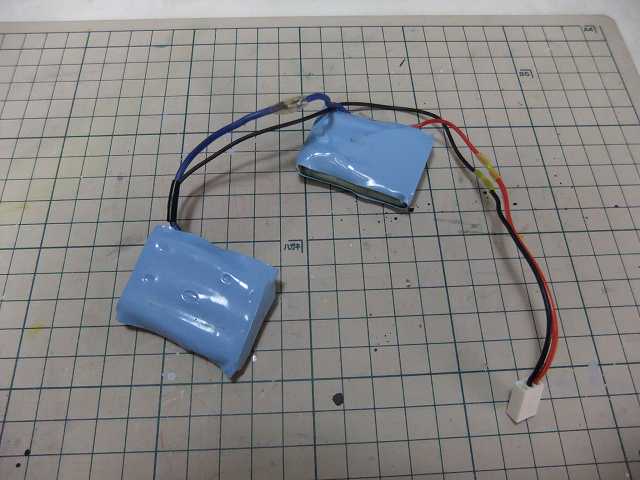
電池 7.2V/700mAhのNiMH電池 タブ付き電池をつなぎ、 ヒシチューブでパックしました。 |
ジャイロ STmicroのL3GD20 に換装しました。 |
XBee PC側の無線機です。 ロボット側にも同じものを積んでます。 |

Visitor Number
Dec 2013
{kind=link}
{kind=link}
{kind=link}
{kind=link}