毎日コミュニケーションズ刊 吉野耕司 著 「60日でできる!二足歩行ロボット自作入門」
で例として製作したロボット「Pen4」について、書籍の中での完成状態を起点とした
追加の製作や試行錯誤の記録を記した製作日誌です。
うまくいった試行については、製作記事のページとしてまとめる予定です。
新しい物から古い物の順で書いています。
08.02.17
VB2008
マイクロソフトのサイトでVisual Studio 2005 Express Editionsのダウンロードが終わり、
Visual Studio 2008 Express Editionsに変わったようなので、2005と同じように使えるのか簡単に試してみました。
まずはVisual Basicです。以下の項目について試してみました。
- その1:本の記事のとおりに使えるか?
ざっと17日目の記事にそって作業してみましたが、特に違和感ありませんでした。
- その2:VB2005のプロジェクトを転用できるか?
最終状態のpen4_vbをVB2008で開いてみました。自動変換の過程を経た後、簡単にテストした範囲では
以前と同様にプログラムは動作しました。
- その3:サポートページからダウンロードしたソースコード類を「既存項目の追加」で使えるか?
ソースコードの一部が読み込まれなかったり、コメントの日本語が
化けてしまう等、読み込んだ後、そのままでは動きませんでした。足りない部分を手で足すと動くように
なりました。これは仕様ではなく、そのうちサービスパックで直りそうな気がしますが、どんなものでしょう?
08.01.06
H8用gccを試す(4)
先週3069に移植を完了した59日目のソースをgccでコンパイルし動かしてみました。
浮動小数点計算他の処理が重くなったせいか、メインループが20msecで回りきれなくなってしまいました。
そのため特に補間モーションの動きがギクシャクしたり、PS2パッドからの操作受付のレスポンス
がダウンしたりといった影響が現れました。しかし、機能的には問題なく動きました。
11/25のところでも触れたように、評価版コンパイラを使った場合と比べてmotファイルの
サイズが倍以上になりますので、AKI-H8/3067FではRAMの容量不足のため動かせません。
しかし、今日の結果を見たところでは、浮動小数点計算の場所を整数計算に書き換え、より計算の高速化を志向した
コーディングを心がければ、I/Oボード1でもI/Oボード2でも動かせるプログラムが出来そうだと思いました。
これで59日目のプログラムを評価版Var1、評価版Var2、h8300-hms-gcc 2.95.3
の3種類のコンパイラで試したことになります。そして、Var1だけで問題が出ました。ちなみに評価版Var1と
gccでは同じローダーでプログラムに起動をかけています。簡単に考えてVar1に問題がありそうだと思いました。
07.12.30
56~58日目の工作とプログラムの移植
I/Oボード2にカメラ(Treva)を接続し、ソフトの移植を行いました。特に問題はありませんでした。
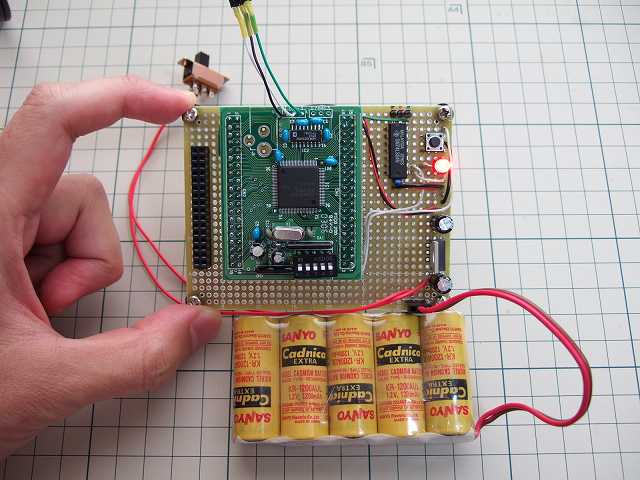
59日目の工作とプログラムの移植
PS2パッドを接続し、ソフトの移植を行いました。
ハードの工作を終え、動作確認を行ったところ、左右旋回の操作をすると、少しヒザを曲げる歩行開始の
動作をするのみでした。そしていきなり手足の関節をばらばらに振り切って転倒しました。
また変数が壊れる類のトラブルの様でした。
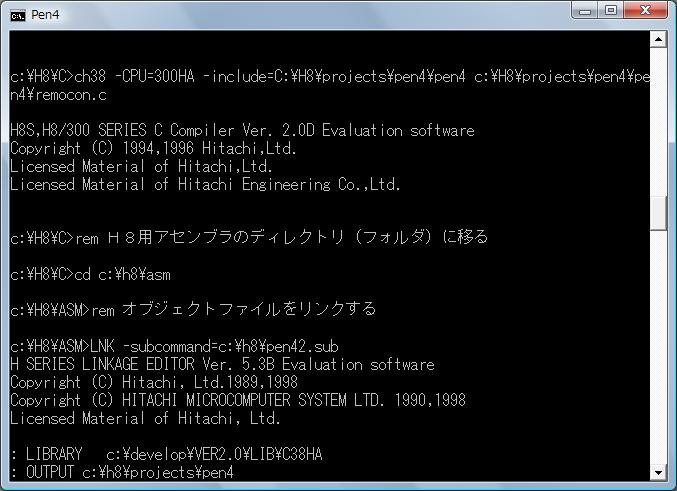
試しに「C言語でH8マイコンを使いこなす」に付属のアセンブラ、コンパイラ、モニタ(マイコンボードの
メモリマップにあわせてソースコードからのビルドが必要)、専用ターミナルの組み合わせで同じプログラムを
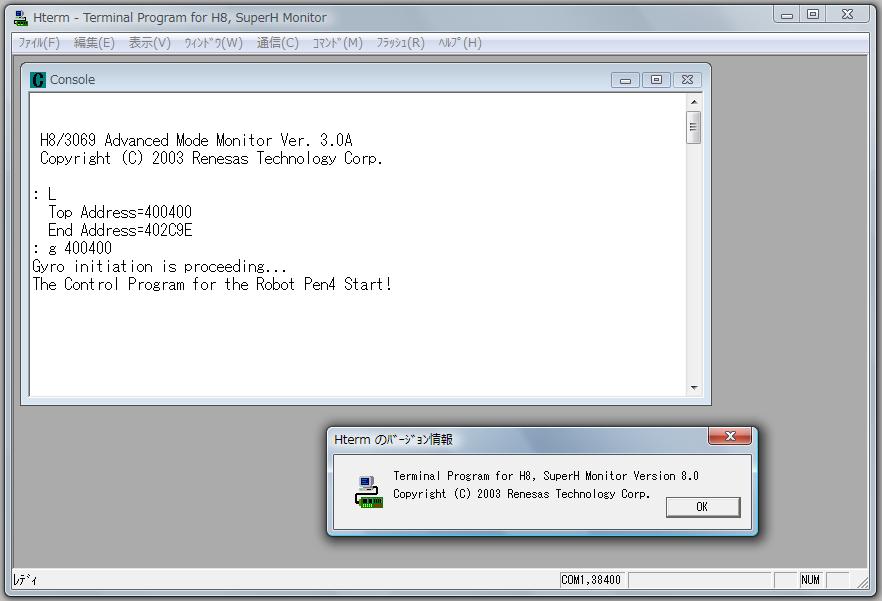
試してみたところ正常に動きました。画面はこんな感じです。
ターミナル(hterm)の画面
コンパイル中の画面
ちなみにこれらのH8開発用ソフトは「60日でできる!二足歩行ロボット自作入門」で使ったものより
新しいバージョンのものです。まだローダーに問題があるのかもしれませんが、とりあえずPen4号用にC言語で
作ったプログラムや、回路には問題がないようなので、この問題はおいおい考えてゆくとして、ここまでの
ドキュメント類を公開しようと思います。



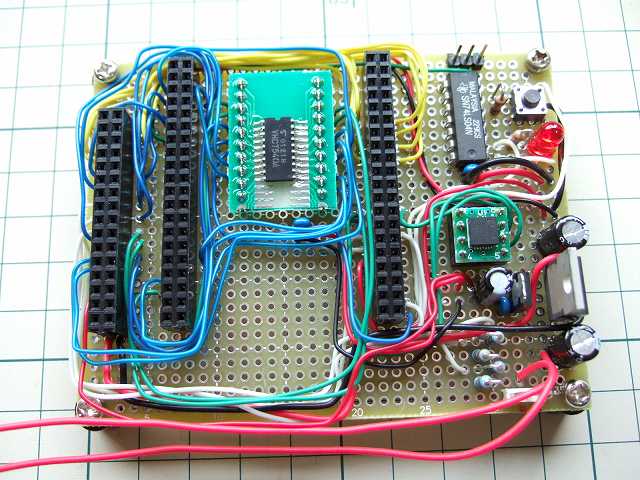
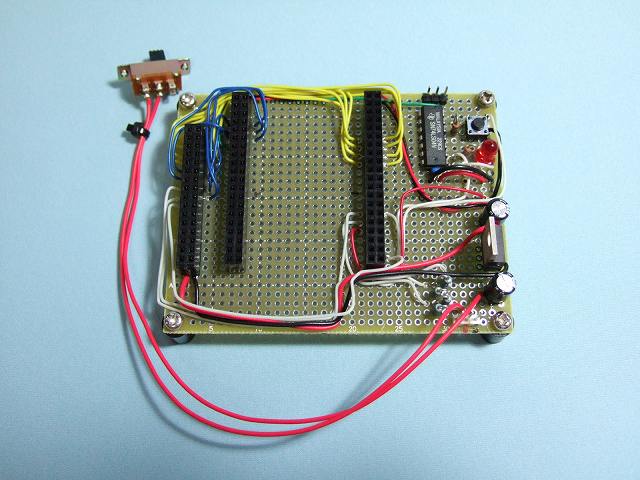
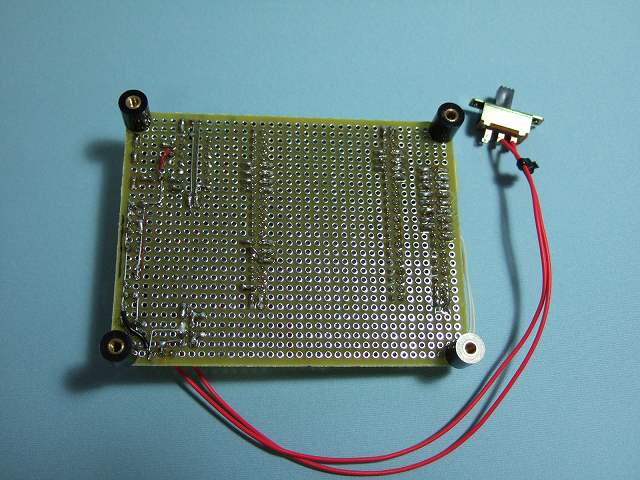
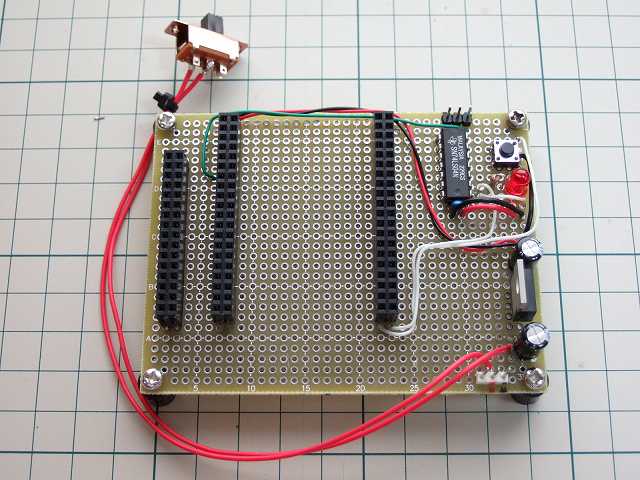
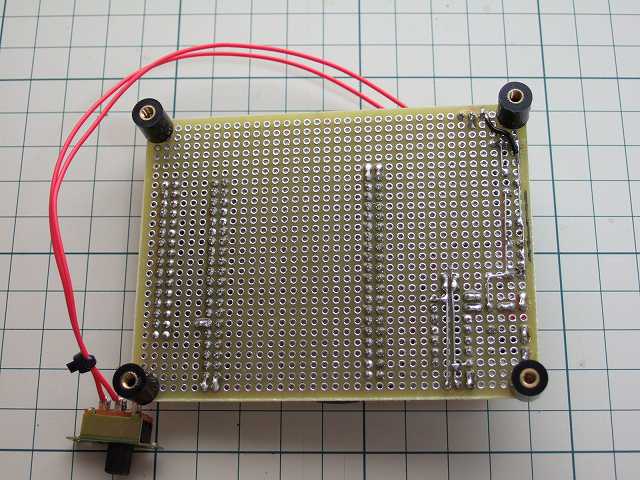
最後まで作業したI/Oボード2
I/Oボード2回路図集
07.12.23
53日目のプログラムの移植
53日目のプログラムをI/Oボード2で動くように移植するトライの続きで以下を試しました。
- コンパイラの問題か確かめるためコンパイラを変えてみる。
- 外付けDRAMが正しく動いていないかもしれないので、内臓RAMだけで動かしてみる。
以上2点を試してみましたが、ほぼ変化なしでした。そこで、そもそも3067のほうでは問題がなかった
プログラムなので、その他の違う場所として自分で作ったローダーのアセンブラ部分を見直してみました。
なんだか怪しいと思いつつも数年来使ってきたモジュールなので問題ないだろうと思っていましたが、
アセンブラのマニュアルをよく読みなおすと、スタックポインタを奇数番地にセットして
システムをスタートしてはいけない様だということが分かりました。そこでそのように直したところ
gccでコンパイルしたプログラムまで含めて正しく動くようになりました。
思えば8008、8080、Z80、6502、8085、8086、80286、68000あたりまでは
まじめに本を読んでいたのですが、みんな同じに思えてきてH8のマニュアルはあまりよく読んでいませんでした。
やはり説明書はよく読まないといけませんね。
56~58日目の工作とプログラムの移植
加速度センサ(KXM52-1050)をI/Oボード2に搭載し、55日目のプログラムを移植しました。回路図が書きかけだったのを
忘れてそのまま作ってしまい、数時間ひっかかりました。
07.12.09
H8用gccを試す(3)
30日目のプログラムを少しずつ変えながら試してみました。そういう仕様なのか、なにかコンパイル
オプションが足りないのか分かりませんが、内部表現のバイト数が小さい型の変数に変換(型キャスト)
した結果が、本で使ったコンパイラと違うことが分かりました。floatの計算についても
予測できない計算結果になりました。
とりあえず分かったのは、結果が保存されない型キャストとfloatの計算を無くせば動く
ということでした。変更が比較的小規模ならば、本のサンプルを全てgcc用に書き換えようかと
思っていましたが、gccに不慣れで挙動がつかめないため、書き直しの5倍くらいの時間が
かかりそうです。そこで、ひとまず試したことをまとめたら公開し、本トライについては終了することとしました。
07.12.02
VistaのPC
OSが無理なく動くハードの値段が手頃になり、パッチもだいぶ出て安定してきたようなので「そろそろ良い頃合い?」と思い、
5年ぶりに新しいPC(マウスコンピュータのLm-i440S、シリアルポート付きのデスクトップ機)を買いました。
使い始めて2週間ほどになります。
ロボット作りに関しては、ドライバが未対応なため「USB-シリアル変換ケーブル」が使えない
だけで、あとは特に問題ありませんでした。
VB2005、VC2005、Dos窓用コンパイラ、CYGWINとgcc、ターミナルソフト等、一通り使ってみた感じでは特に問題なく
動いています。(CYGWINはインストールで警告が出ましたがOKでした)簡単にVistaのPCに乗り換えることが分かって
よかったです。「USB-シリアル変換ケーブル」についても、当然そのうちにVista対応の機種が発売されると思う
ので、まあ問題にならないでしょう。
Pen4号製作のブログ
本書読者のYassyさんからPen4号製作のブログを作ったとメールを頂きました。筆者としてはこういう
形の反応もとってもうれしいです。本書執筆にあたっては、自分で作りながら原稿を書くとともに、原稿で
編集さんが実際に作ってみて、苦労した点などもフィードバックしているのでより分かりやすくなっていると
思います。しかし、製作例や作った感想などは、より多くの視点があるほど製作される方の参考になると
思いましたので、ここで紹介させていただくこととしました。
「吉野家のロボットを作ろう」http://yassy7.blog44.fc2.com/
私も時々読ませていただこうと思っています。(個人的には誤記情報が有難いです。(笑))
07.11.25
H8用gccを試す(2)
先週から続けて試しています。30日目からとんで53日目のプログラムをコンパイルして
みました。これは動きませんでした。変数の持ち方や型変換のの時の挙動が違うための
様でした。このあたりをコツコツと書き換えていけば、まあ使えそうだと思いました。
同じ53日目のプログラムをAKI-H8/3067F用にもコンパイルしてマイコンに
ロードしてみました。コンパイル済のプログラムをよく見ると、MOTファイルの時点で
本で使ったコンパイラの倍以上のファイルサイズになっており、3067で動くPen4号
に「プログラムエリア」として確保してあるメモリーのエリアに収まりませんでした。
一番簡単なLEDを点滅するプログラムで調べたところ、浮動小数点(float)型
の変数を使うと大きくなることが分かりました。I/Oボード1にgccを適用するときは
上記の変数の挙動の違いに留意するとともに、floatを使わない形に書き換えれば使えそうだと
思いました。(完全な作り直しに近いですね・・・)
H8プログラミングの参考書
「C言語でH8マイコンを使いこなす」鹿取祐二 著 オーム社
以前読んだ本ですが、コンパイラではまっているので、県立図書館から借りてきて読みなおしました。
(まだ売っています)
H8以外のCPUやPCでC言語とアセンブラの知識がある方にお勧めです。H8固有のことが分かって
「なるほど~」と思われることでしょう。
07.11.18
H8用gccを試す(1)
先週からH8用のプログラムを、本の製作日数の若い方から順番にgccでコンパイルして
動作確認を続けていますが、30日目(すべてのRCサーボを動かす)のプログラムが動
かず原因を調べるのにハマリました。
各関節がとんでもない方向に動くため、Pen4号を壊さないようにマイコンを
フレームから取り出し、RCサーボ向けの信号をオシロスコープで見ながら、プログラムの
色々なところを書き換えては様子を見るということを繰り返して調べました。
その結果、コンパイルする時に何気無く付けていた最適化オプションが影響して、PAポートに
出力するビットパターンが変わってしまっている事が分かりました。
(RCサーボの信号を作っているforループの中が最適化されてしまっていました。)
その後プログラムは、最適化オプションを止めてから正しく動くようになりました。
07.11.11
プログラムの移植
52日目(最寄のものに近づいてパンチ)のプログラムまで移植とテストを完了しました。
そして53日目(自律行動プログラム)のソースコード編集を終えて、動作確認したところ関数
に変数の中身が渡らない現象にあいました。W6の自律プログラムを書いているときも同じような
現象にあい、その時は構造体を大きくしてゆく途中で問題が出たので、構造体を分割してその場を
しのぎました。
同じプログラムがH8/3067F用としては動いているので、本当のところ何が原因なのか分かり
ませんが、本で使ったコンパイラの入手状況も悪くなってきたので、この際AKI-H8/3069F
キットについてくる。(秋月で500円で別売りもしているフリーソフト)H8用gccを使う方向
で、使い方を調べ始めました。
AKI-H8/3069FキットについてくるCDのH8/OS用サンプルプログラムの、LED点滅
プログラムを参考にしてmakeファイルとRAMコントロールファイルを作り、本の一番初め(8日目)
で作ったLED点滅プログラムをコンパイルし、上手く動くことを確認しました。
AKI-H8/3067Fキット入荷
読者の方からのメールで分かったのですが、再入荷していました。
とりあえず、またI/Oボード1の方も、本のとおりに作れる様になったので良かったです。
07.10.28
プログラムの移植
48日目(補間モーションの作成)のプログラムまで移植とテストを完了しました。
基本機能の範囲で特に問題無いことが確認できたため、ココまで製作記事をまとめて
公開することにします。
記事はだいたい書けたので、ひととおり見直してから1~2週間のうちに公開しようと
思います。
07.10.21
プログラムの移植
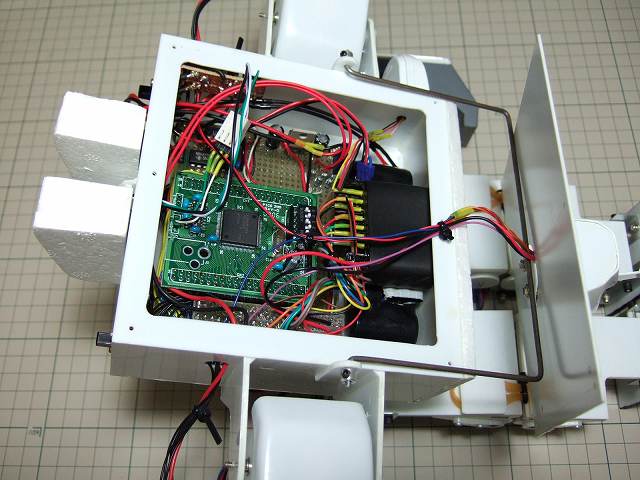
43日目(旋回モーション)のプログラムまで移植とテストを完了しました。

I/Oボード2をフレームに収めたところ
07.10.14
I/Oボード2の組立
I/Oボード2の回路図追記
ローダー
ローダーの画面
出来上がったので、少なくとも記事の最後までは問題が無いか、使ってみながらテスト中です。
10日目のところまで使ってみたところでは特に問題なく、自分で言うのもなんですが、なかなか
良い感じです。テストを終えたら使い方を書いてアップします。
07.10.07
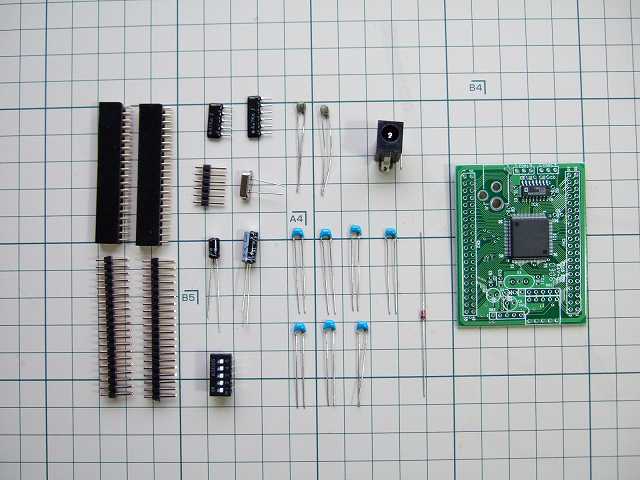
H8/3069Fキットの組立
キット付属の説明書と写真を参考に組立てます。
 組立前==>
組立前==>
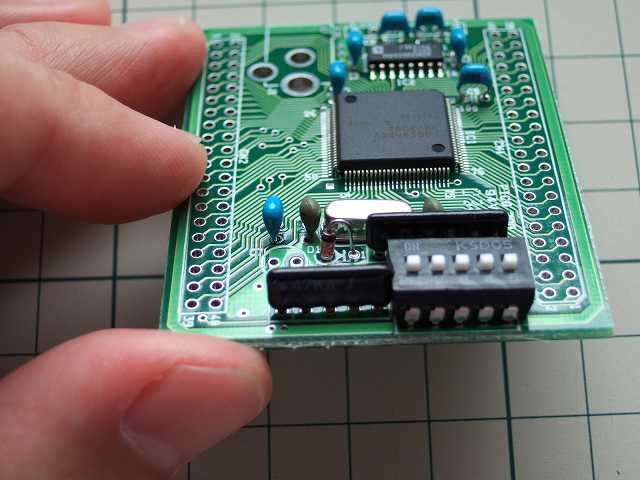
 完成
完成
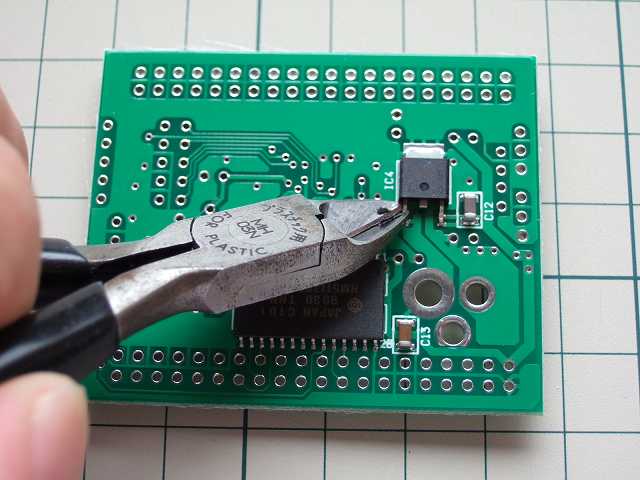
A/CアダプターのジャックとCOM0用のピンヘッダは使わないので付けませんでした。

マイコンボード裏面についている3端子レギュレータについても、5V電源をI/Oボード2
側から供給するため使わないので足を切っておきます。

ディップスイッチと集合抵抗が干渉して基板に付けられなかったので、ディップスイッチ側を
少しカッターで削りました。

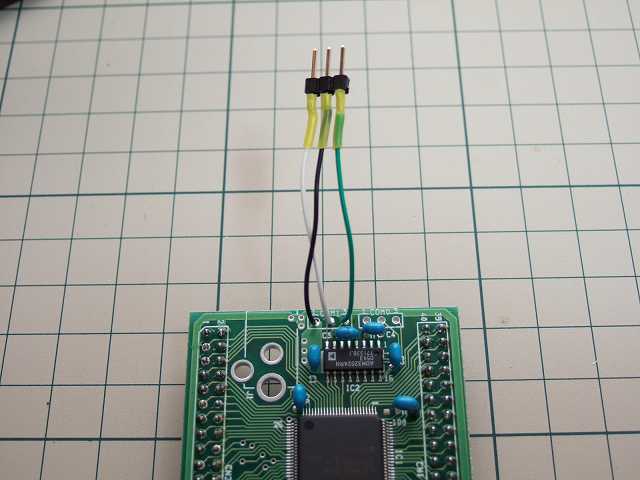
H8/3067Fボード用に作ったケーブル(本では6日目の記事)を使おうと思いましたが
H8/3067FボードのJ5とH8/3069FボードCOM1はピンの配置が違いました。
違いを吸収するためCOM1から線を延ばしてピン配置を入れ替えました。
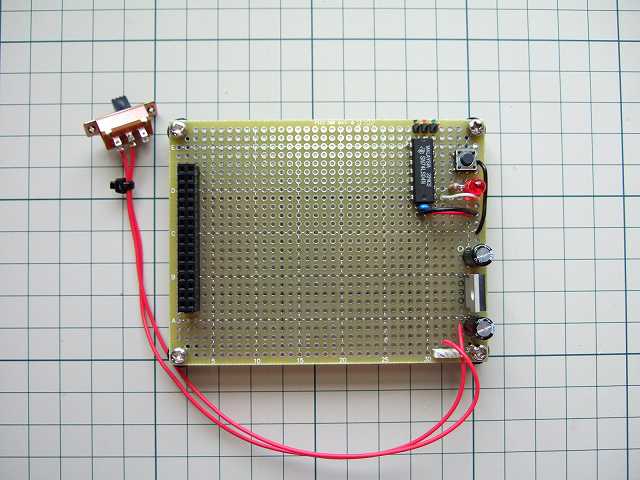
I/Oボード2の組立
記事の5日目(78ページ)まではI/Oボード1と同じです。その先についても配線は
違いますが作り方は同じです。

ここまでは同じ。ここから先は
回路図
に沿って配線しました。


P84まで作業したところ
マイコン側のピンヘッダが5個から2個に減るので
シンプルになります。

P85の動作確認
今度のマイコンボード上にLEDはありません。
ローダー
ローダーからロードされたプログラムへ制御を移す部分の書き方を調べるため10年ぶり
くらいでH8のCコンパイラのマニュアルを真剣に読みました。
そしてテストプログラムを作ってみました。こちらは問題なく動いているようです。
記事に合わせる為「本で使っているモニタ」と同じ使い方のローダーを用意する方向で
進めてきましたが、
ロードする機能の方は、ここしばらくトライしていたプログラム
(いつもモーションデータなどを受け取るのに使っているプログラムの派生型)
ではターミナルソフトからの送信を受けられないことがだいたい分かりました。
回避策としてアセンブラで作ることも考えましたが、私がアセンブラで作ろうと思うととても時間がかかりそうです。
そこで方針を変えて、PC側はフラッシュライター風のGUIのソフトをVB2005で作り、
マイコン側はモーションデータを受け取るソフトをモディファイしたものを作ろうと思いました。
07.09.30
I/Oボード2の回路設計
とりあえず図面を描いてみました。まだ作って検証していないので
間違えている場所があるかもしれませんが大体こんな感じです。
名前は、
H8/3069Fマイコンボードを使ったI/Oボードを「I/Oボード2」
オリジナルを「I/Oボード1」と呼ぶことにします。

2007/09/30版 I/Oボード2回路図
主な相違点や特徴は以下のとおりです。
- マイコンの機種 H8/3067F → H8/3069F
- 外部RAMの容量 32kByte → 2MByte
- クロック 20MHz → 25MHz
- I/O点数の余裕 ・・・減少
- ロボットのフレーム側から見ると、オリジナルバージョンのI/Oボードと完全互換
- プログラムは全面的に改修(アドレスやポートの変更が主です)
- マイコンボードのコネクタの数変更。(コネクタ間の対応は
「J1,2,3,4、7 → (CN1)&(CN2)」です)
ローダー
一旦RAMのワークエリアに受け取る部分を何パターンか作ってみました。同期が上手く取れず
通信が安定しませんでした。まだいろいろ試しながら調べることが多そうです。
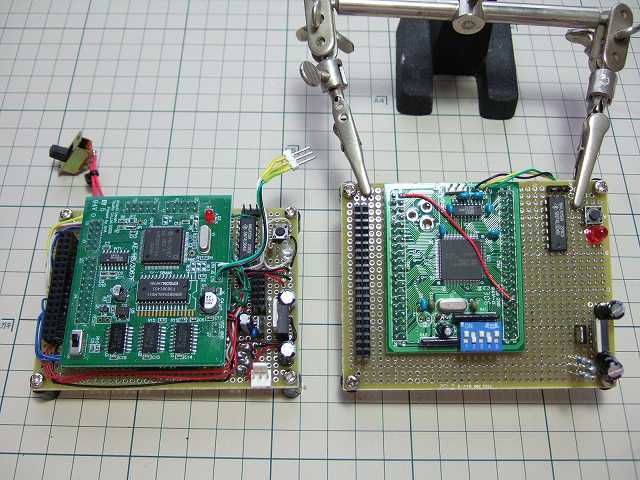
キットとI/Oボード2
07.09.24
H8/3067マイコンボードの代替案検討
読者の方からのメールで知ったのですが、AKI-H8/3067Fマイコンボードが入荷時期未定で
品切れになっていました。ぶっちゃけ似た様な仕様のマイコンボードならばなんでも使える
といえば使えるのですが、このキットでないと本のとおりに作れません。
「60日でできる!二足歩行ロボット自作入門」は一応「入門書」を標榜していますので
「適当に読み替えて作ってください・・・」というのはちょっと不親切な気がしました。
これから1年くらいは仕事が忙しい予定なので、すぐにとはいきませんが別のマイコンキット
をのせた時の回路図や、そのマイコン用に書き換えた制御ソフトを公開しようかと、検討を
はじめました。
代替マイコンは通販コードK-204のAKI-H8/3069Fマイコンボードキットです。
このキット用にはモニタプログラムがありませんので、代わりになるようなソフトを作る
ところから作業を始めました。
プロトタイプのテストとして、W6のメインCPUを使って、
ターミナルソフトから送られてくるSフォーマットのプログラムを
指定のアドレスに展開する機能をCで書いて試してみました。
が、実行速度不足でバッファオーバーラン
エラーでした。
というわけで次のプロトタイプはテキストデータを一度ワークエリアに素通しして、
後でバイナリデータに変換したり、チェックサムを計算したりする様にする予定です。
07.09.02
I/Oボード回路図の更新
I/Oボードに手を加えるための足がかりというか準備のため、本の中で「オプション装備」として
加えた加速度センサ、カメラに関連する回路そして3.3V系の電源回路を書き加えました。

2007/08/26版 I/Oボード回路図
制御系5V電源回路の変更
内蔵電池で動かす時に、実際にロボットを動かせる電圧の幅を広げ、動ける時間を
増やそうという意図で変更してみることにしました。具体的には電源回路の3端子
レギュレータを、DC/DCコンバータに変えてみました。
部品の変更は ナショナルセミコンダクタLM2940CT-5.0 → コーセル SUS1R50505C です。
秋葉原のマルツパーツ館で購入しました。
カタログ上は5Vを出力できる入力電圧が4.5V程度に下がるので、効果があると期待しています。
結果は実際に動かしてみてのお楽しみです。

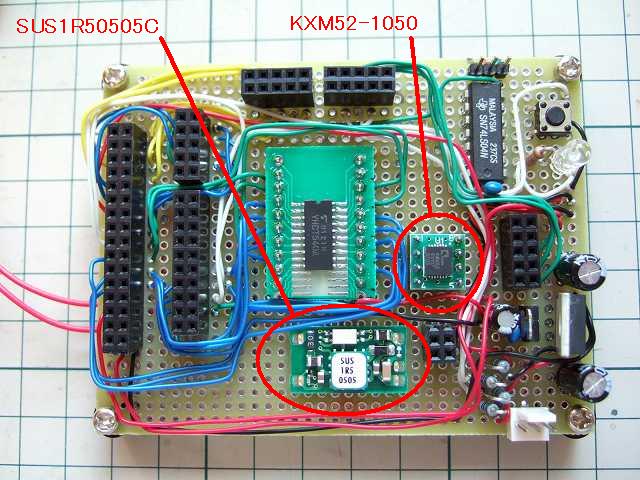
SUS1R50505C
加速度センサの変更
本で紹介した加速度センサ※は、執筆期間中に生産が終わってしまったので記事は一般的なこと
を中心に書きました。しかしながら代替機種の紹介は必要だろうと思い、今日現在入手できる
機種の1つに換装してテストしてみることにしました。
のせてみたのは秋月電子通商製のモジュールで、センサはKionix製KXM52-1050です。値段は
元の約1/6(\800-)と安価です。ただモジュールの「使用上の注意」に2gを超える加速度や
衝撃を加えると、異常な出力値を示したまま戻らなくなるなるなど、気になることが書いて
ありました。HAAM-313Bは「衝撃に強い」ことがデータシートにアピールされていたのとは
大違いです。

KXM52-1050モジュール
でも実際にI/Oボードにのせて、動作中にI/Oボードで机を軽く叩いてみましたが
普通に動いていたので、「実用上は問題ない」という結果になることを期待してこのまま
使ってみることにしました。
※モジュールは浅草ギ研製、センサは北陸電気工業製 HAAM-313Bです。

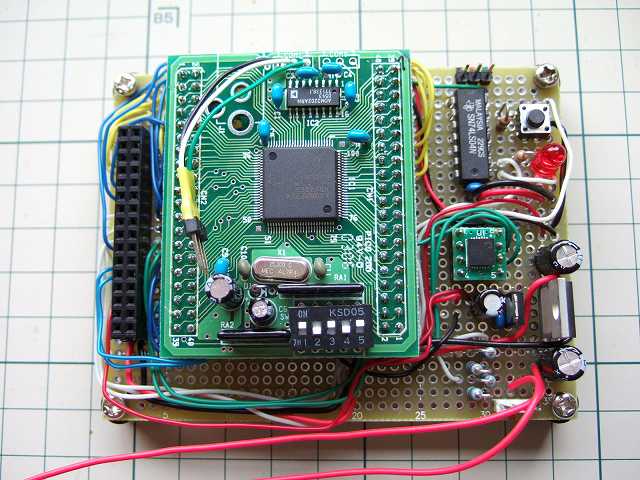
I/Oボード
SUS1R50505CとKXM52-1050をのせ終わった状態のI/Oボードの写真です。
戻る
ホームへ戻る





{kind=link}
{kind=link}